Ana Gómez¹, Oscar Salgado¹, Ekait Esteban², Inge Isasa³ y Xabier Hernández³
Este trabajo recibió el premio Elevatori High Tech Award otorgado al mejor informe técnico durante la Elevcon 2018 que se llevó a cabo el último Mayo en Berlín, Alemania.
El monitoreo de las condiciones es una tarea crucial para la confiabilidad electromecánica del sistema y para el incremento de la calidad, ya que permite la detección temprana de las fallas eléctricas y mecánicas gracias al mantenimiento predictivo. El objetivo de este estudio es analizar la factibilidad de un enfoque de detección virtual para realizar un diagnóstico de la salud en el campo de los ascensores. El enfoque de detección virtual utilizará un modelo electromecánico del ascensor y algunas mediciones disponibles para obtener algunas otras leyes físicas (Sensores virtuales.). Para probar la metodología se utilizará un banco de prueba con ascensores en escala, obteniendo así distintos indicadores y analizando su evolución en el tiempo en condiciones de fallas específicas.
INTRODUCCIÓN
La tendencia que hoy sostiene el incremento del mercado de los ascensores es el crecimiento de las áreas urbanas. En base a un informe global (Naciones Unidas, 2014), en 2014 el 54% de la población mundial residía en las áreas metropolitanas, en 1950 el porcentaje era del 30% y la previsión para el 2050 calcula ser de un 66%. La dimensión del mercado de los ascensores y de las escaleras mecánicas tiene una estimación de crecimiento, en dólares, de 88,78 billones en 2015 a 125,22 billones para 2021, con un Componente Anual de Tasa de Crecimiento (CAGR en inglés) del 6,01% (Markets and Markets, 2016). Factores como el aumento de la demanda en el área del Pacífico asiático y la demanda creciente de industrias como la residencial, comercial, institucional de infraestructura, industrial y marina son los motores del crecimiento del mercado de los ascensores y las escaleras mecánicas. La estructura de venta del negocio de los ascensores está dividida en tres segmentos: instalación de nuevos ascensores, mantenimiento, y modernización de las instalaciones existentes. Los servicios de mantenimiento generan ganancias a través de todo el ciclo de vida de un ascensor (Caporale, 2016). Sin embargo, el lucro en los servicios está disminuyendo a causa del crecimiento de los costos (Ehoff, 2010). El costo de las inspecciones in situ, que incluyen los costos de la mano de obra, representa más de la mitad del costo total. Reducir el número de las inspecciones in situ podría permitir bajar los costos de los servicios de mantenimiento, haciendo que aumentaran los márgenes de ganancia.
En la actualidad la mayor parte de las operaciones de mantenimiento son ejecutadas siguiendo las normas disciplinarias o las estrategias de mantenimiento preventivo. En el primer caso se actúa cuando el sistema o un componente ya ha fallado, mientras que en el segundo se planifican inspecciones periódicas y se sustituye el sistema o el componente tratando de anticiparse a una falla posible. Nuevas tendencias en tecnologías de mantenimiento tienden al mantenimiento predictivo, en el cual las inspecciones o las sustituciones son ejecutadas cada vez que se prevé que sucederá una falla. El mantenimiento predictivo evalúa la condición del equipo realizando monitoreo de las condiciones del mismo en forma periódica (offline) o continua (online).
En el último decenio el monitoreo de las condiciones de los sistemas electromecánicos ha recibido una atención creciente, tanto desde el mundo académico como desde la industria (Kyriakides y Polycarpou, 2014). Este desarrollo está motivado por la creciente demanda de eficiencia en los costos, en la confiabilidad y en la calidad del producto de los sistemas industriales electromecánicos, para lo cual es esencial reducir los tiempos de inactividad no programada y llevar al mínimo los costos operativos y de mantenimiento. Tales técnicas se pueden clasificar según enfoques basados en la física o sus datos (Patton y otros, 2000). Los enfoques basados en los datos son adecuados para aplicaciones en las cuales se cuenta con un conocimiento limitado a priori del sistema monitoreado (Yin y otros, 2015). Las prestaciones de los enfoques basados en los datos dependen mucho de la calidad y de la cantidad de los datos disponibles (Gouriveau y otros, 2013). Con respecto a los enfoques basados en la física, ellos pivotan en la disponibilidad de un modelo matemático del sistema monitoreado, que a su vez puede derivarse de principios de modelos físicos (Isermann y Munchhof, 2011). Las prestaciones de las técnicas basadas en la física dependen en gran parte de la precisión del modelo en el que se describen las dinámicas de interés (Yin y otros, 2014).
Enfoques basados en la física han sido utilizados con éxito en el monitoreo y control de los sistemas electromecánicos (Mastinu y Plochl, 2014, Khoshzaban-Zavarehi, 1997). Sin embargo, tanto los enfoques basados en la física, como los basados en los datos hacen uso de mediciones recolectadas por sensores disponibles.
A pesar de las numerosas tentativas, la aplicación de nuevos métodos de elaboración de señales para el monitoreo del estado de las instalaciones para ascensores está todavía hoy en un campo de investigación activo. Como ejemplo de enfoque basado en datos, ( Wuming y otros, 2010) las señales de aceleración de la cabina han sido utilizados para entrenar a una red neural artificial con el objetivo de clasificar diferentes fallas de la máquina. Las señales actuales (Flores y otros, 2008) han sido elaboradas mediante el análisis de la firma actual de la máquina a fin de detectar fallas de la misma. Con referencia a los enfoques basados en la física, estos han sido utilizados para monitorear los cables de acero mediante la medición de su resistencia eléctrica (Stucky y otros, 2013) o por el control flexible en los ascensores (Nai y otros, 1994). La estrategia del control flexible es utilizada para controlar las vibraciones verticales de la cabina. Esta estrategia de control en un modelo que representa las dinámicas verticales de un ascensor y un algoritmo del filtro Kalman (KF) funciona como observador. La corriente de la cabina y las señales del codificador son utilizadas como observación, mientras el algoritmo KF valida la velocidad vertical de la cabina.
En este ensayo el sistema electromecánico estudiado es un elevador de tracción 1:1 (Janovsky 1999) en el cual veremos aplicados los enfoques basados en la física para monitorear el estado. Estos enfoques tienen el potencial de monitorear las instalaciones con señales ya existentes. Además, utilizando las señales existentes y estimando los parámetros del sistema, se puede observar otras variables físicas no mensurables directamente. Esta es también conocida como estrategia virtual percibida basada en la física (Seren y otros, 2015), en la que la estimación basada en observaciones (por ejemplo KF, EKF) son sensores virtuales.
El desarrollo de nuevos métodos dedicados al monitoreo del estado de los ascensores necesita de una validación antes de su instalación en un ascensor real. A fin de reducir los esfuerzos en la ejecución de la prueba, y para facilitar la validación de los nuevos métodos, se ha diseñado un banco de prueba en la IK4- Ikerlan con la capacidad de imitar las dimensiones de todos los ascensores de cables 1:1 (Esteban y otros, 2017). Dicho banco de prueba será utilizado en el ámbito de este estudio para experimentar la metodología y analizar la evolución de algunos indicadores, en particular para monitorear el estado del sistema de guías, ya que es de los componentes principales que influyen en la calidad de la marcha en los sistemas de transporte vertical (y también por la dificultad de validar sus condiciones).
METODOLOGÍA
Un sensor virtual es una medida estimada de una variable desconocida del sistema que no está medida directamente por un sensor físico, pero que resulta en cambio derivada de condiciones y parámetros estimados. Sustituye un sensor físico cuya instalación no es posible, tanto porque no está disponible un sensor especialmente, o porque es muy costoso. Los sensores virtuales basados en la física confían tanto en modelos precisos como en algoritmos de estimación de la condición, siendo el Kalman Filter (KF) el más utilizado. Si bien el KF es el filtro de estimación linear óptimo, está limitado a sistemas lineales. El Filtro Esteso Kalman (EKF) usa un modelo no lineal definido en estado de forma espacial como se muestra en la ecuación (1)
ẋ = f (x, u, t) + w (1)
y = h(x, u, t) + v
En la derivación estocástica bayesiana del EFK se supone que tanto el proceso como las ecuaciones de medición tienen una distribución cero del ruido gaussiano blanco (w y v en la ecuación (1) de la covarianza Q y R respectivamente. De la misma forma se supone que los estados del sistema x son supuestos como variables gaussianas con una covarianza P. En cada fase el EKF linealiza el modelo en torno al punto de estimación, propagando una aproximación lineal de la covarianza. El modelo linealizado es ulteriormente hecho discreto suponiendo el mantenimiento a cero para el ingreso (u) y la integración continua de la medición del ruido (v). Un observador es un algoritmo que proporciona un estimado de las condiciones no mensuradas y de los parámetros de un sistema dinámico (Figura 1). Un observador clásico requiere un modelo de proceso y un modelo de salida. El modelo de proceso describe las dinámicas del sistema, en cambio el modelo de salida describe la relación entre los estados internos y las salidas. El modelo del proceso describe las dinámicas del sistema, en cambio el modelo de la salida describe la relación entre los estados internos y las salidas.
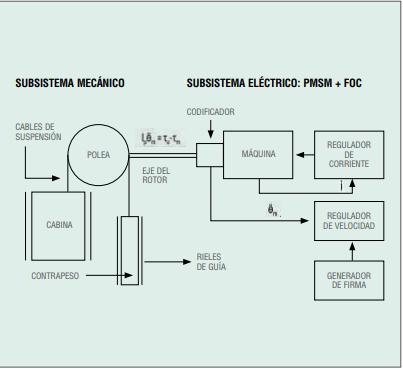
Figura 1. Descripción esquemática simplificada de las instalaciones de un ascensor.
La instalación de un ascensor comprende tanto un subsistema mecánico como un subsistema eléctrico (Figura 2). La masa de la cabina del ascensor se balancea con un contrapeso para reducir el torque necesario que requiere una máquina eléctrica. Una máquina eléctrica hace mover el sistema a través de una polea sobre los cables de suspensión que conectan la cabina y el contrapeso. Tanto la cabina como el contrapeso se mueven verticalmente, ambos unidos por un par de guías. La instalación es movilizada por una máquina eléctrica comandada por un control orientado al campo (FOC) en el cual se genera un perfil de velocidad para cada recorrido, en base a la posición de partida de la cabina y a su destino final.
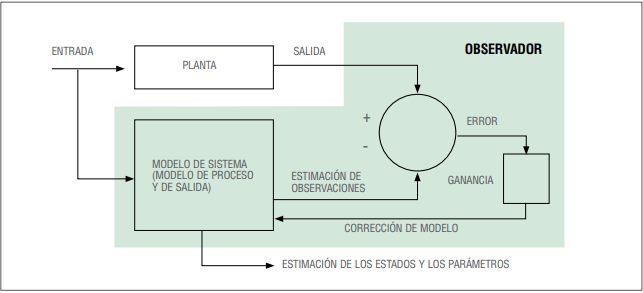
Entrada – Plata Salida – Observador – Error Modelo de sistema (modelo de proceso y de salida)
Estimación de observaciones – Ganancia- Corrección de modelo- Estimación de los estados y los parámetros
Figura 2. Diagrama de bloques de un observador.
El modelo electromecánico de un ascensor une la máquina eléctrica, el control de circuito cerrado y el subsistema mecánico. En particular, el foco de este ensayo versará sobre la estimación de un coeficiente de fricción que ofrecerá un indicador de las condiciones del sistema de guía.
¹ Área de control y Monitoreo, IK 4-IKERLAN, España.
² Departamento de Mecánica y Producción Industrial, de la Univ. Mondragón, España.
³ Departamento de Ingeniería Mecánica, Orona EIC S. Coop., España.
—————————-
Fuente: Elevatori.